前回の記事はこちら.
注文していた基板が届きました!
Elecrowに発注して配送はOCS/ANA Expressを選択,送料込みで10枚2000円くらいです.火曜の夜に注文して翌週の月曜に届きました(早い!).しかも,Elecrowから発送メールが届いたときにはすでに自宅に不在票が届いていました笑
いつも基板頼むと佐川急便のお兄さんが配達してくれるのですが,不在票が届く前に配達時間を指定できないものですかね…
はんだ付け
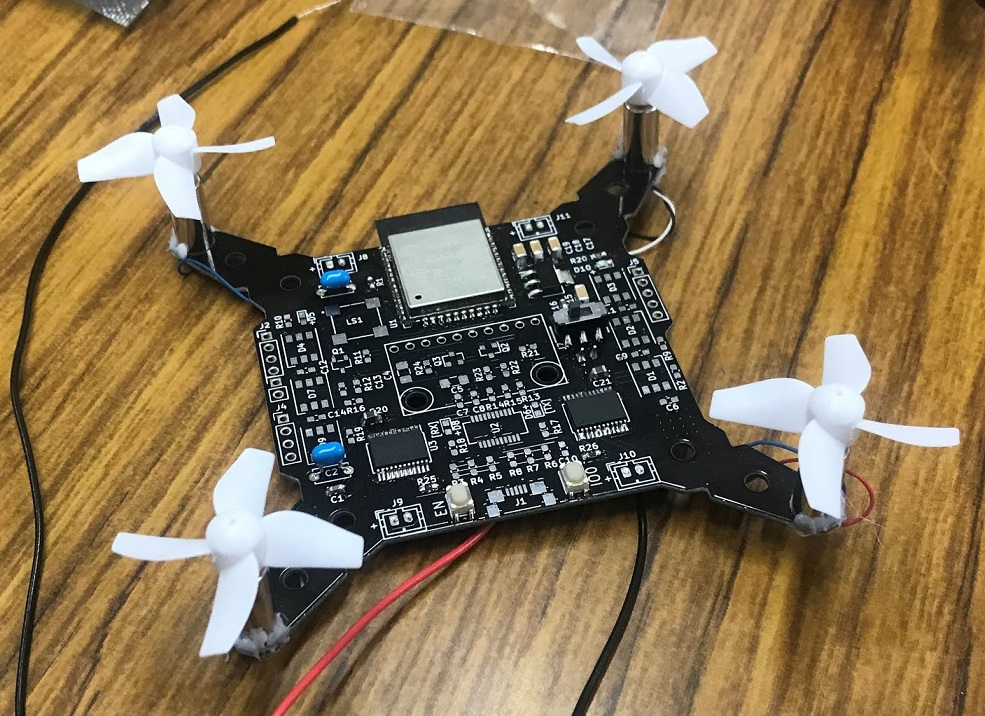
まずは電源回りとマイコン,モータドライバのみ実装…
次に4つのモータを回すだけのプログラムを書きます.開発環境はArduino for ESP32です.これが一番ラクなので.
4つのモータを単に回してみた結果がこちら↓↓↓
初号機失敗😵😵😵 pic.twitter.com/hzzqKJMaAV
— やまと (@_ymt_117) December 1, 2019
姿勢制御も何もしていないので残念ながら飛びませんでした…
ドローンから伸びている配線は安定化電源と繋がっています.5Vで3Aくらい流れていました.モータのPWM値をいきなり最大の255にすると電流が一気に流れてしまい,マイコンが落ちてしまったので以下のようにfor文を使って徐々に出力を上げるようにしました.
次のバージョンではマイコンとモータの電源を分けたほうがいいだろうか.でも分けるとバッテリー2つになって重くなるからなあ…と悩みどころ
1
2
3
4
5
6
7
for(int i=0; i<256; i++){
motor_a_cw(i);
motor_b_ccw(i);
motor_c_cw(i);
motor_d_ccw(i);
delay(1);
}
書き込み回路(ミスってた)
モータを回すだけの実験ではUARTのピンにシリアル変換機を繋いでプログラムを書き込みました.
その後,基板上に書き込み回路をはんだ付けして書き込みしてみました.が,動かない…
PCに接続するとシリアル変換ICのFT232XSをCOMポートとして認識してくれるはずですが,うんともすんとも言いません.それどころか電源サージの警告が表示されました.
回路図を見返してもおかしなところはなさそうだし,テスターで導通チェックをしてみても短絡はしてなさそうです.
後日気づいたのですが,USB micro-Bのフットプリントにミスがありました.まず1~5のパッドが逆であったこと,そしてさらにD-とD+が逆になっていました.ここを直せば動きそうです.

とりあえずこの基板に関しては,外付けでシリアル変換機を使ってプログラムの書き込みをしていきたいと思います.
今回はこの辺で終わりにして,次は9軸センサについて書きたいと思います.